Think Linear Algebra is not for sale yet, but if you would like to support this project, you can buy me a coffee.
2. A Day At the Track#
This chapter introduces vector addition and subtraction, and a few ways to represent these operations graphically.
To demonstrate these operations, we’ll use GPS tracking data I collected. We’ll convert measurements in latitude and longitude to positions in Cartesian coordinates. Then we’ll use differences between successive positions to estimate velocity, and differences between velocities to estimate acceleration. If you know calculus, you will recognize these steps as a form of numerical differentiation.
Finally, we’ll reverse the process: we’ll add up accelerations to estimate velocity, and add up velocities to estimate position – which you might recognize as a form of numerical integration.
Click here to run this notebook on Colab.
Show code cell content
# temporary hack to make autoreload work on Colab
import importlib, sys
sys.modules["imp"] = importlib
%load_ext autoreload
%autoreload 2
Show code cell content
from os.path import basename, exists
def download(url):
filename = basename(url)
if not exists(filename):
from urllib.request import urlretrieve
local, _ = urlretrieve(url, filename)
print("Downloaded " + local)
download("https://github.com/AllenDowney/ThinkLinearAlgebra/raw/main/utils.py")
Show code cell content
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from utils import decorate, plot_vector, plot_vectors, scatter, trajectory, norm, label_point
Show code cell content
from utils import set_precision
set_precision(4)
2.1. Vector Addition and Subtraction#
Let’s start with the basics of adding and subtracting vectors – then we’ll see an example where these operations are useful. We’ll use NumPy arrays to store the Cartesian coordinates of two vectors.
A = np.array([1.1, 0.2])
B = np.array([0.1, 0.9])
To add vectors in this representation, we add the coordinates elementwise – and since that’s what array addition does, we can perform vector addition like this.
C = A + B
C
array([1.2, 1.1])
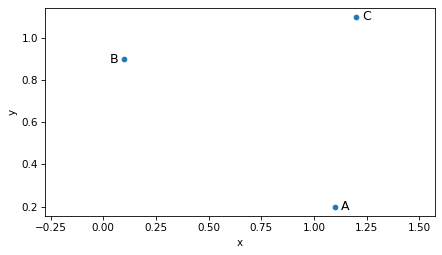
We can think of a vector as a point in the Cartesian plane, so we can draw A, B, and C like this.
scatter([A, B, C], s=20)
label_point('A', A, label_pos=3)
label_point('B', B, label_pos=9)
label_point('C', C, label_pos=3)
plt.axis('equal')
decorate(xlabel='x', ylabel='y')
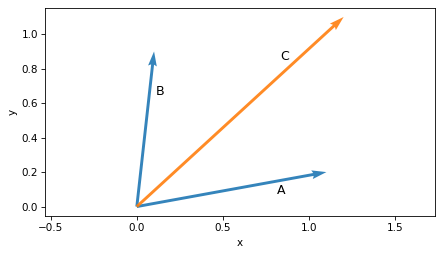
It is also common to represent vectors as arrows with their tails at the origin.
plot_vector(A, label='A', label_pos=2)
plot_vector(B, label='B', label_pos=2)
plot_vector(C, label='C', label_pos=10, color='C1')
plt.axis('equal')
decorate(xlabel='x', ylabel='y')
But it’s not necessary to put the tail at the origin.
For example, we could put the tail of B at the head of A.
plot_vector(A, label='A', label_pos=2)
plot_vector(C, label='C', label_pos=10, color='C1')
plot_vector(B, origin=A, label='B', label_pos=2)
plt.axis('equal')
decorate(xlabel='x', ylabel='y')
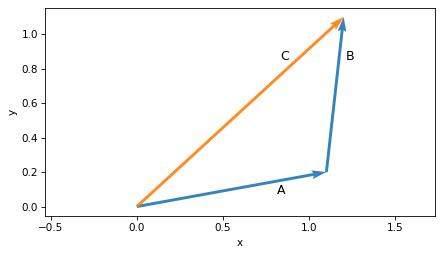
In this arrangement we can see that adding vectors is like lining them up head to tail.
If we start from the origin and follow A, then continue from A and follow B, we arrive at their sum, C.
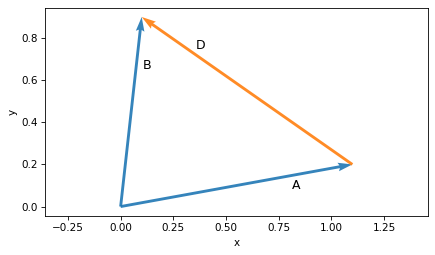
To compute the difference between two vectors, we subtract the coordinates elementwise.
D = B - A
D
array([-1. , 0.7])
If we plot the result, D, with its tail at A, we get a graphical representation of subtraction.
And if we follow the arrows, we can see the inverse operation – the sum of A and D is B.
plot_vector(A, label='A', label_pos=2)
plot_vector(B, label='B', label_pos=2)
plot_vector(D, origin=A, label='D', label_pos=2, color='C1')
plt.axis('equal')
decorate(xlabel='x', ylabel='y')
These examples show three ways to represent a vector: a point in Cartesian coordinates, an arrow with its tail at the origin, or an arrow at any other location. They also show the graphical representation of vector addition and subtraction.
Now we’ll use these vector operations to work with GPS data.
2.2. GPS Data#
To prepare for this chapter, I went for a short run wearing a watch that tracked my location using the Global Positioning System (GPS). I downloaded the results as a GPX file, which is a standard format for storing GPS tracks.
We’ll use load_gpx to parse the file and extract the data.
import gpxpy
def load_gpx(filename):
"""Load a GPX file and return a DataFrame with lat, lon, elevation, and time."""
with open(filename, "r") as f:
gpx = gpxpy.parse(f)
records = []
for track in gpx.tracks:
for segment in track.segments:
for point in segment.points:
records.append({
"time": point.time,
"latitude": point.latitude,
"longitude": point.longitude,
"elevation": point.elevation,
})
return pd.DataFrame(records)
download("https://github.com/AllenDowney/ThinkLinearAlgebra/raw/main/data/oval_run.gpx")
df_all = load_gpx("oval_run.gpx")
df_all.head()
| time | latitude | longitude | elevation | |
|---|---|---|---|---|
| 0 | 2025-11-16 16:08:09+00:00 | 42.2934 | -71.2637 | 59.2000 |
| 1 | 2025-11-16 16:08:10+00:00 | 42.2935 | -71.2637 | 59.2000 |
| 2 | 2025-11-16 16:08:11+00:00 | 42.2935 | -71.2637 | 59.2000 |
| 3 | 2025-11-16 16:08:17+00:00 | 42.2936 | -71.2637 | 59.3000 |
| 4 | 2025-11-16 16:08:18+00:00 | 42.2936 | -71.2637 | 59.3000 |
The result is a Pandas DataFrame with one row for each measurement and columns for time, latitude and longitude in degrees, and elevation in meters above sea level.
For this example, we’ll select a segment of the run starting from the 34th measurement.
df = df_all.iloc[34:].reset_index(drop=True)
To visualize the data, we’ll extract an array of latitude-longitude pairs.
cols = ['latitude', 'longitude']
latlon = df[cols].values
Then we can use the trajectory function to plot it as a set of points in the plane – with fliplr to flip the latitude and longitude columns so they correspond to x-y coordinates.
trajectory(np.fliplr(latlon), marker='o')
plt.axis("equal")
plt.gca().ticklabel_format(useOffset=False)
decorate(xlabel='Longitude (degrees)', ylabel='Latitude (degrees)',
title='GPS Trajectory in degrees')
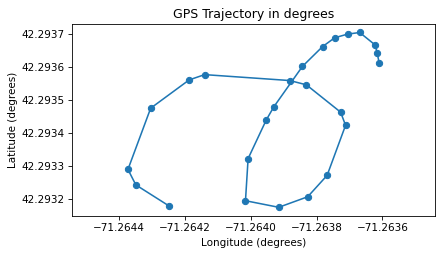
If you are curious, you can probably figure out where I ran.
Working with latitude and longitude has some drawbacks: the units are in degrees rather than meters, and the relationship between these coordinates and actual distances depends on where you are on Earth. But with a little geometry, we can convert latitude and longitude to distances in meters.
2.3. Distances#
To approximate the distance between two points on the surface of the earth, we’ll convert each latitude-longitude pair to a 3D vector with its tail at the center of the earth, then compute the length of the vector difference between them.
As an example, let’s extract the start and end points from the GPS trajectory.
start = latlon[0]
start
array([ 42.2936, -71.2636])
end = latlon[-1]
end
array([ 42.2932, -71.2642])
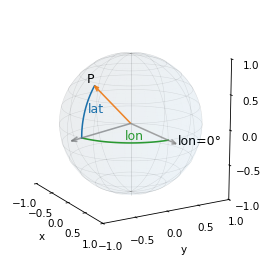
The key is to think of latitude and longitude as spherical coordinates, where longitude is the azimuth angle, measured in the plane of the equator from the reference point where longitude is 0, and latitude is the elevation angle, measured from the plane of the equator toward the poles.
The following figure shows the location of start as the vector labeled P.
from utils import spherical_coords_diagram
spherical_coords_diagram(*start)
We can use sph2cart() to convert latitude and longitude to Cartesian coordinates – we just have to convert from degrees to radians, and be careful about the order of the arguments.
from utils import sph2cart
def latlon_to_cartesian(latlon, radius=1.0):
lat, lon = latlon.T
result = sph2cart(np.deg2rad(lon), np.deg2rad(lat), radius)
return result
Now we can convert our start and end points to vectors, using the average radius of the earth in meters.
r_earth = 6_371_000
start_vec = latlon_to_cartesian(start, r_earth)
start_vec
array([ 1513777.2923, -4462926.6972, 4287237.4095])
end_vec = latlon_to_cartesian(end, r_earth)
end_vec
array([ 1513738.0516, -4462974.3777, 4287201.6299])
Here’s the difference between the vectors.
diff = end_vec - start_vec
diff
array([-39.2407, -47.6805, -35.7796])
The length of this difference vector is the distance between the points.
distance = norm(diff)
distance
71.3683
It’s about 71 meters.
This calculation assumes that the earth is a sphere, so the radius is the same everywhere. In fact, the earth is closer to an ellipsoid where the semi-axis from the center of the earth to the poles is about 6,357 km and the semi-axis from the center to the equator is about 6,378 km, a difference of about 0.3 percent.
This calculation also assumes that the distance between two points on the surface is a straight line, not an arc. For small distances as in this example, the error due to this approximation is very small. To check, we can use the haversine formula, which computes the distance on an arc between two points.
from haversine import haversine, Unit
haversine_distance = haversine(start, end, unit=Unit.METERS)
haversine_distance
71.3684
The straight line approximation is off by only 0.0001%, which is negligible compared to the spherical approximation.
Let’s encapsulate the straight-line approximation in a function.
def distance_between(start, end, r_earth=6_371_000):
start_vec = latlon_to_cartesian(start, r_earth)
end_vec = latlon_to_cartesian(end, r_earth)
return norm(end_vec - start_vec)
Now we have everything we need to convert from latitude-longitude pairs to distances in meters.
2.4. Converting Coordinates#
To start, we’ll compute the mean of the lat-lon pairs.
latlon_mean = latlon.mean(axis=0)
latlon_mean
array([ 42.2935, -71.2639])
Now we can compute the offset of each point from the center, multiplying by 1000 so the results are in millidegrees.
latlon_offset = (latlon - latlon_mean) * 1000
latlon_offset[:3]
array([[0.1458, 0.3005],
[0.1758, 0.2945],
[0.1998, 0.2885]])
To convert them to meters, we need to know how many meters correspond to one millidegree of latitude and longitude at our location.
We can use distance_between to compute this.
First, we’ll create a vector that represents a location offset from latlon_mean by one millidegree in the direction of positive latitude, which is north.
Then we’ll compute the distance between latlon_mean and this offset point.
north = [0.001, 0]
meters_north = distance_between(latlon_mean, latlon_mean+north)
meters_north
111.1949
Next we’ll do the same thing with a point offset by one millidegree in the direction of positive longitude, which is east.
east = latlon_mean + [0, 0.001]
meters_east = distance_between(latlon_mean, east)
meters_east
82.2518
These distances tell us the number of meters per millidegree at this location. We’ll put these conversion factors in an array we’ll use as a scaling vector.
scale = np.array([meters_north, meters_east])
scale
array([111.1949, 82.2518])
If we multiply the offsets in millidegrees by this scaling factor, the results are offsets in meters.
latlon_meters = latlon_offset * scale
latlon_meters[:3]
array([[16.2167, 24.715 ],
[19.5525, 24.2215],
[22.2212, 23.728 ]])
As the last step, we have to reverse the order of the columns – because latitude corresponds to the y coordinate and longitude corresponds to the x coordinate.
positions = np.fliplr(latlon_meters)
positions[:3]
array([[24.715 , 16.2167],
[24.2215, 19.5525],
[23.728 , 22.2212]])
Let’s plot the result as a trajectory.
trajectory(positions, 'C2o-')
plt.axis("equal")
decorate(xlabel="x position (m)", ylabel="y position (m)",
title="GPS Trajectory in meters")
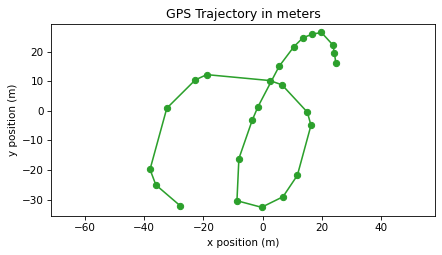
After all that, the trajectory in meters doesn’t look very different from the trajectory in degrees of longitude and latitude. But now that it is expressed in meters, we’ll use it to compute velocity and acceleration.
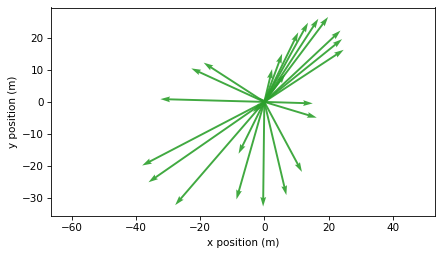
2.5. Position and Velocity#
At this point we have a sequence of vectors that represent offsets from a central point. So far we have visualized these vectors as points in space, but we can also visualize them as arrows with their tails at the origin, like this.
plot_vectors(positions, color="C2", width=0.005)
plt.axis("equal")
decorate(xlabel="x position (m)", ylabel="y position (m)")
If we compute the difference between each successive pair of vectors, the result is a sequence of vectors that represent offsets between successive locations.
We’ll use NumPy’s diff() function – with the keyword axis=0, it computes differences between rows.
displacements = np.diff(positions, axis=0)
displacements.shape
(24, 2)
The result has one row fewer than positions.
If we plot these differences with their tails at the corresponding locations, we can see that they connect the dots along the trajectory.
plot_vectors(positions, color="C2", width=0.005, alpha=0.3)
plot_vectors(displacements, positions[:-1], color="C1", width=0.005)
plt.axis("equal")
decorate(xlabel="x position (m)", ylabel="y position (m)")
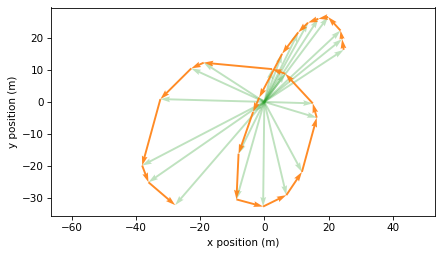
These differences represent offsets between successive measurements. So we can estimate the total distance I ran by computing the lengths of these vectors and adding them up.
total_distance = norm(displacements, axis=1).sum()
total_distance
220.8934
To compute elapsed time, we’ll convert the timestamps in df["time"] to seconds since the start.
start_time = df["time"].iloc[0]
ts = (df["time"] - start_time).dt.total_seconds().values
ts
array([ 0., 1., 2., 4., 5., 6., 7., 9., 13., 14., 17., 21., 24.,
26., 28., 32., 33., 36., 37., 42., 43., 46., 52., 53., 55.])
The elapsed time is the last element.
elapsed_time = ts[-1]
elapsed_time
55.0000
My average speed is total distance divided by elapsed time, which is about 4 meters per second. For comparison, the world record time for 200 meters is 19.19 seconds (set by Usain Bolt in 2009), which is 10.4 meters per second. In my defense, the route I ran has sharper turns than a standard track.
total_distance / elapsed_time
4.0162
Now let’s see how my velocity changed over time.
To convert displacements to velocities, we have to divide through by the time between measurements.
We can use diff to compute the time intervals.
dts = np.diff(ts)
dts
array([1., 1., 2., 1., 1., 1., 2., 4., 1., 3., 4., 3., 2., 2., 4., 1., 3.,
1., 5., 1., 3., 6., 1., 2.])
The time between measurements is usually one second, but sometimes longer. We can compute velocity by dividing displacements by time differences.
velocities = displacements / dts[:, None]
velocities.shape
(24, 2)
The results are velocity vectors in meters per second. The following figure shows these vectors with their tails at the corresponding positions.
plot_vectors(positions, color="C2", width=0.005, alpha=0.3)
plot_vectors(velocities, positions[:-1], color="C1", width=0.005)
plt.axis("equal")
decorate(xlabel="x position (m)", ylabel="y position (m)")
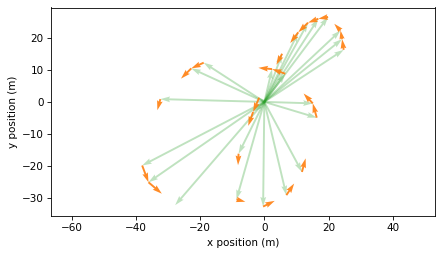
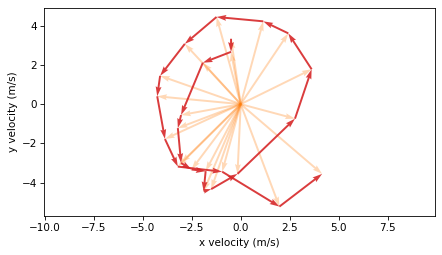
I think this is a good way to visualize position and velocity, but it is not technically correct because the position and velocity vectors are not in the same units. As an alternative, we can plot the velocity vectors with their tails at the origin, like this:
plot_vectors(velocities, color="C1", width=0.005)
plt.axis("equal")
decorate(xlabel="x velocity (m/s)", ylabel="y velocity (m/s)")
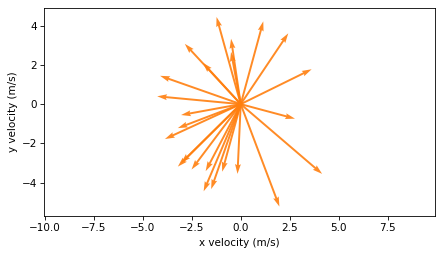
In this version, it is less clear what’s happening physically, but this representation will be useful in the next section when we compute acceleration.
The magnitude of each velocity vector is the speed, which we can compute with norm().
speeds = norm(velocities, axis=1)
speeds.shape
(24,)
Each velocity vector is computed from two consecutive positions, so the time we associate with it is the midpoint of the two measurement times.
ts_vel = (ts[:-1] + ts[1:]) / 2
ts_vel
array([ 0.5, 1.5, 3. , 4.5, 5.5, 6.5, 8. , 11. , 13.5, 15.5, 19. ,
22.5, 25. , 27. , 30. , 32.5, 34.5, 36.5, 39.5, 42.5, 44.5, 49. ,
52.5, 54. ])
This figure shows speed over time.
plt.plot(ts_vel, speeds, color='C1')
decorate(xlabel="Time (s)", ylabel="Speed (m/s)")
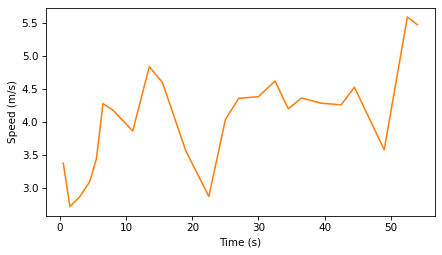
The results are noisy because the measurements are noisy – and taking the difference between successive measurements tends to amplify the noise.
2.6. From Velocity to Acceleration#
To get from position to velocity, we computed differences between successive positions, displacements, and divided by differences in measurement times, dts.
Now to get from velocity to acceleration, we’ll compute differences between successive velocities and divide again by differences in times.
dvs = np.diff(velocities, axis=0)
dvs.shape
(23, 2)
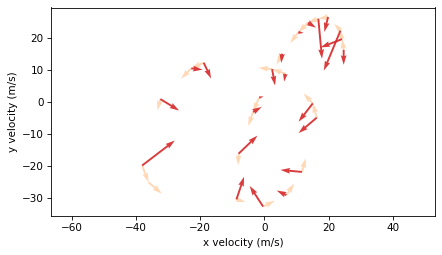
Now we’ll plot these changes in velocity with their tails at the corresponding velocity vectors.
plot_vectors(velocities, color="C1", width=0.005, alpha=0.3)
plot_vectors(dvs, velocities[:-1], width=0.005, color="C3")
plt.axis("equal")
decorate(xlabel="x velocity (m/s)", ylabel="y velocity (m/s)")
To compute acceleration, we divide the velocity changes by the time intervals between velocity measurements.
dts_vel = np.diff(ts_vel)
accelerations = dvs / dts_vel[:, None]
To visualize the results, we’ll plot each acceleration vector with its tail at the head of the corresponding velocity vector.
plot_vectors(velocities, positions[:-1], color="C1", width=0.005, alpha=0.3)
plot_vectors(accelerations, positions[:-2], scale=7, color="C3", width=0.005)
plt.axis("equal")
decorate(xlabel="x velocity (m/s)", ylabel="y velocity (m/s)")
Again, it’s not completely correct to plot velocity and acceleration on the same axes, because they are not in the same units. But this representation shows that acceleration vectors point toward the center of the curve, which is characteristic of centripetal acceleration – the acceleration needed to make an object follow a curved path.
The magnitude of acceleration indicates how quickly velocity is changing.
magnitudes_acc = norm(accelerations, axis=1)
magnitudes_acc
array([0.6672, 1.0287, 1.927 , 0.6872, 1.7867, 0.4201, 0.2415, 0.4135,
0.1998, 0.4436, 1.162 , 1.0639, 1.0941, 0.4713, 0.9583, 1.0604,
1.0308, 0.3519, 0.7383, 0.7773, 0.5059, 0.9769, 1.8297])
Each acceleration vector corresponds to the midpoint of two velocity times.
ts_acc = (ts_vel[:-1] + ts_vel[1:]) / 2
ts_acc
array([ 1. , 2.25, 3.75, 5. , 6. , 7.25, 9.5 , 12.25, 14.5 ,
17.25, 20.75, 23.75, 26. , 28.5 , 31.25, 33.5 , 35.5 , 38. ,
41. , 43.5 , 46.75, 50.75, 53.25])
Here’s the magnitude of acceleration over time.
plt.plot(ts_acc, magnitudes_acc, color='C3')
decorate(xlabel='Time (s)', ylabel='Magnitude of acceleration (m/s²)')
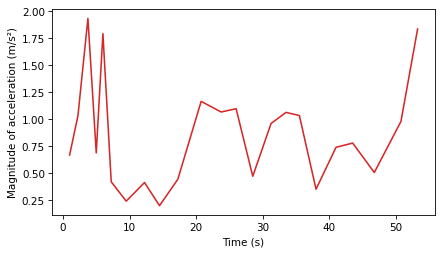
Again, the results are noisy – in general, if the measurements are noisy, the velocities we compute are noisier, and the accelerations are even noisier.
2.7. From Acceleration to Velocity#
In the example so far, we started with position, used diff() to compute velocity, and used diff() again to compute acceleration.
Now suppose instead using a system like GPS to measure position, we use a device like an accelerometer to measure acceleration. Most cell phones have an accelerometer that can be used to detect motion, orientation, and sudden changes in movement – it is used for features like screen rotation, step counting, image stabilization, and crash detection.
In theory we can use a sequence of measurements from an accelerometer to estimate velocity, and use velocity to estimate position. In this section we’ll see how that works – but we’ll also see why it is not always a practical solution.
Suppose that when I was running, I recorded acceleration in the x and y directions.
To simulate the results of this hypothetical experiment, we’ll use the acceleration vectors we just computed.
To get from acceleration to velocity, we have to start from a stand-still, or a known velocity. For this example, we’ll use the velocity we computed as a known initial value.
v0 = velocities[0]
We’ll multiply by dts_vel to get the changes in velocity, then use cumsum to compute the cumulative sum of the changes.
dvs_from_acc = accelerations * dts_vel[:, None]
velocities_from_acc = np.vstack([[v0], v0 + np.cumsum(dvs_from_acc, axis=0)])
Here we’re using vstack to add the initial velocity as the first row of the array.
The velocities we get from the cumulative sum of acceleration are the same as the ones we get from differences in position, except for floating-point errors.
To get from velocity to position, the process is almost the same. We multiply velocities by time differences to get displacements.
displacements_from_acc = velocities_from_acc * dts[:, None]
Then, starting from a known position, we add in the cumulative sum of the displacements.
x0 = positions[0]
positions_from_acc = np.vstack([[x0], x0 + np.cumsum(displacements_from_acc, axis=0)])
The results are the same as the positions we started with, except for floating-point errors.
np.allclose(positions, positions_from_acc)
True
2.8. An Imperfect World#
In the previous example, we were able to get from acceleration to position with near-perfect precision. But in the real world, measurements are not perfect. To simulate measurement error, we’ll generate a random noise factor and multiply by the accelerations we computed.
noise_factor = np.random.normal(1, 0.02, size=accelerations.shape)
accelerations_noisy = accelerations * noise_factor
The simulated measurements are off by about 1% on average. Now we’ll use the noisy accelerations to estimate velocity.
dvs_noisy = accelerations_noisy * dts_vel[:, None]
velocities_noisy = np.vstack([[v0], v0 + np.cumsum(dvs_noisy, axis=0)])
And we’ll use the estimated velocities to estimate the trajectory.
displacements_noisy = velocities_noisy * dts[:, None]
positions_noisy = np.vstack([[x0], x0 + np.cumsum(displacements_noisy, axis=0)])
Here’s the trajectory we constructed from noisy measurements compared to the original GPS track.
trajectory(positions, label="measured", color='C2')
trajectory(positions_noisy, label="noisy reconstruction", color='C6')
plt.axis("equal")
decorate(xlabel="x position (m)", ylabel="y position (m)")
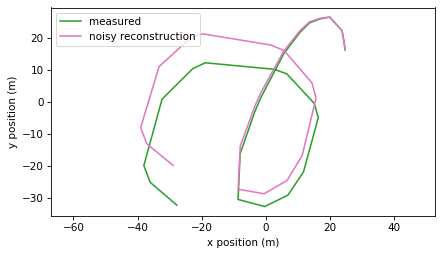
We can see that the two trajectories diverge. At the end, they differ by about 12 meters.
So this way of estimating position from acceleration is not accurate. And what we simulated is nearly the best case scenario, where the initial position and velocity are known exactly, and the measured accelerations are only off by 1%.
In a real scenario, we don’t know the initial conditions precisely, and real measurements of acceleration are probably not that accurate, especially taken from a phone carried by a running person.
Using an accelerometer to estimate small displacements over a short period of time might be possible in some conditions, but it is not generally practical.
2.9. Discussion#
This chapter introduces addition and subtraction of vectors, and several ways to represent vectors graphically: as points in a Cartesian plane (or 3D space), as arrows with their tails at the origin, or as arrows with their tails at other locations.
The vectors in this chapter were considered free vectors, which means that they represent a direction and magnitude, but they don’t have a particular position in space. In Chapter xxx, we will work with bound vectors, which have direction, magnitude, and position.
As applications of addition and subtraction, we computed the distance between two points on the surface of a sphere, which we used to convert measurements of latitude and longitude to Cartesian coordinates.
Then we used diff() to subtract successive positions to get velocity, and subtract successive velocities to get acceleration.
If you are familiar with calculus, you might recognize these steps as a numerical form of differentiation.
A challenge of numerical differentiation is that it amplifies measurement noise, so velocity is noisier than position and acceleration is noisier than velocity.
Finally, we used cumsum() to add up accelerations to estimate velocity, and add up velocities to estimate positions.
You might recognize these steps as a form of integration.
A challenge of numerical integration is that errors accumulate, so the results are less accurate for longer trajectories.
2.10. Exercises#
2.10.1. Exercise#
A paper in the Proceedings of the National Academy of Sciences (PNAS) investigates whether honeybees can navigate in a “map-like” way.
Here’s the key question: if a bee knows how to fly from the hive to location A, and from the hive to location B, can it navigate a direct path from A to B without first returning to the hive?
There are two possible navigation strategies:
Origin-based navigation: The bee flies from
Aback to the hive, then from the hive toB.Map-like navigation: The bee computes the displacement from
AtoB, and flies toBdirectly, without going back to the hive.
Surprisingly, the paper reports some evidence that bees are capable of map-like navigation.
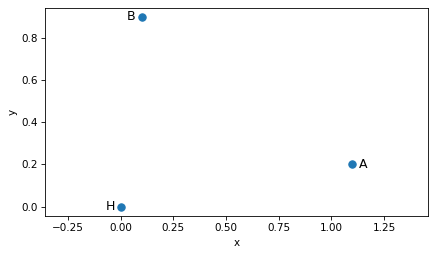
Let’s explore this with the vectors A and B from the beginning of this chapter – and we’ll put the hive at the origin, labeled H.
H = np.array([0.0, 0.0])
A = np.array([1.1, 0.2])
B = np.array([0.1, 0.9])
The following figure shows the hive and locations A and B.
scatter([H, A, B], s=50)
label_point('H', H, label_pos=9)
label_point('A', A, label_pos=3)
label_point('B', B, label_pos=9)
plt.axis('equal')
decorate(xlabel='x', ylabel='y')
Plot the origin-based route from
AtoB: draw an arrow fromAtoH, and an arrow fromHtoB. Hint, you can reverse a vector by computing-A.On the same plot, draw the direct route from
AtoB.
You should be able to confirm that -A followed by B adds up to B-A.
2.10.2. Exercise#
In this chapter, we approximated the distance between nearby GPS points by converting latitude and longitude to 3D Cartesian vectors and computing the length of the difference between vectors. This works well for short distances, but for points that are far apart on the surface of the Earth, it is less accurate.
In this exercise, we’ll compare the straight-line approximation to the great-circle distance between two cities.
Use the following latitude and longitude coordinates (in degrees):
Boston, MA: latitude 42.3601°, longitude −71.0589°
London, UK: latitude 51.5074°, longitude −0.1278°
Use the
distance_betweenfunction from this chapter to compute the straight-line distance between Boston and London, which would burrow through the Earth.Use the
haversinefunction to compute the great-circle distance between the same two points. This distance corresponds to the shortest path along the surface of the Earth.Compute the absolute difference between the two distances, in meters.
Compute the relative difference between the two distances, as a percentage of the great-circle distance.
2.10.3. Exercise#
An airplane flying from Boston to London has a measured airspeed – that is, speed relative to the surrounding air – and a measured heading. The plan is flying in the jet stream, a river of air that flows from west to east across the Atlantic Ocean.
In this exercise, you will add the velocity of the plane, relative to the air, and the velocity of the jet stream, relative to the ground, to get the velocity of the plane relative to the ground.
Assume the plane’s airspeed is 250 m/s and it’s heading is 60°, measured clockwise from north, as on a magnetic compass. Assume that the speed of the jet stream is 50 m/s, blowing toward 90° (due east).
Convert the speed and heading of the plane to a 2D Cartesian velocity vector.
Convert the speed and heading of the jet stream to a 2D Cartesian velocity vector.
Compute the sum of these velocity vectors.
Use
plot_vectorto plot the two velocity vectors and their sum.Convert the total velocity back to a ground speed and ground heading.
Supposing that the plane intended to fly at a heading of 60°, how much is its effective heading off by?
You can use pol2cart and cart2pol, which convert between polar coordinates (speed and heading) and Cartesian coordinates (x and y components) – but note that these function expect and return headings in radians counterclockwise from the x axis.
# Airspeed and heading (approximate Boston → London heading)
airspeed = 250.0 # m/s
heading_air_deg = 60.0 # degrees (measured clockwise from north)
# Jet stream: speed and heading (direction the wind is blowing toward)
wind_speed = 50.0 # m/s
heading_wind_deg = 90.0 # degrees (east)
2.10.4. Exercise#
In this chapter, we estimated velocity by taking differences between successive position measurements. Because GPS measurements are noisy, the estimated velocities that are even noisier.
In this exercise, we’ll smooth the GPS track before computing velocity, and compare the results to the unsmoothed estimates.
SciPy provides a function that fits a smooth 2D parametric spline to the GPS positions and measurement times.
The s parameter controls the smoothness of the fitted path.
from scipy.interpolate import splprep, splev
tck, _ = splprep(positions.T, u=ts, s=10)
Now we can use splev() to evaluate the spline at equally-spaced points in time, and I’ll put the results in an array with the same shape as position.
ts_equal = np.linspace(ts[0], ts[-1], 50)
xy = splev(ts_equal, tck)
positions_smooth = np.transpose(xy)
positions_smooth.shape
(50, 2)
Use
trajectory()to plot the original and smoothed trajectories and see how they compare.Use the smoothed positions to compute displacement and total distance traveled. How does the length of the smoothed trajectory compare to the original.
Use the smoothed positions and
ts_equalto estimate smoothed velocities.Compute the speed from the velocity vectors and plot speed versus time.
2.11. Animation#
Now let’s animate a circle following the smoothed trajectory. We’ll show the path building up behind the moving marker.
import matplotlib.animation as animation
from IPython.display import HTML
fig, ax = plt.subplots()
# Plot the original trajectory as faded reference
trajectory(positions, alpha=0.2, color='gray')
# Create empty line for the animated path
[path_line] = plt.plot([], [], 'C0-', lw=2, alpha=0.7)
# Create circle marker for current position
marker_radius = 3
marker = plt.Circle((0, 0), marker_radius, color='C1', zorder=5)
ax.add_patch(marker)
# Set axis limits based on data
margin = 10
ax.set_xlim(positions_smooth[:, 0].min() - margin,
positions_smooth[:, 0].max() + margin)
ax.set_ylim(positions_smooth[:, 1].min() - margin,
positions_smooth[:, 1].max() + margin)
ax.set_aspect('equal')
ax.set_xlabel('x position (m)')
ax.set_ylabel('y position (m)')
plt.close(fig)
def animate_frame(frame_num):
# Update the path to show trail up to current position
path_line.set_data(positions_smooth[:frame_num+1, 0],
positions_smooth[:frame_num+1, 1])
# Move the circle marker
marker.center = positions_smooth[frame_num]
return path_line, marker
num_frames = len(positions_smooth)
interval = 100 # milliseconds between frames
anim = animation.FuncAnimation(
fig,
animate_frame,
frames=num_frames,
interval=interval
)
HTML(anim.to_jshtml())
Copyright 2025 Allen B. Downey
Code license: MIT License
Text license: Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International