10. Flocks, Herds, and Traffic Jams#
Code examples from Think Complexity, 2nd edition.
Copyright 2016 Allen Downey, MIT License
import matplotlib.pyplot as plt
import numpy as np
Show code cell content
from os.path import basename, exists
def download(url):
filename = basename(url)
if not exists(filename):
from urllib.request import urlretrieve
local, _ = urlretrieve(url, filename)
print('Downloaded ' + local)
download('https://github.com/AllenDowney/ThinkComplexity2/raw/master/notebooks/utils.py')
download('https://github.com/AllenDowney/ThinkComplexity2/raw/master/notebooks/Cell2D.py')
from utils import decorate, savefig
# make a directory for figures
!mkdir -p figs
10.1. Traffic jam#
Here’s the Driver class from Chapter 10.
class Driver:
def __init__(self, loc, speed=4):
"""Initialize the attributes.
loc: position on track, in miles
speed: speed in miles per hour
"""
self.start = loc
self.loc = loc
self.speed = speed
def choose_acceleration(self, dist):
"""Chooses acceleration based on distance.
dist: distance from the car in front
returns: acceleration
"""
return 1
def set_odometer(self):
self.start = self.loc
def read_odometer(self):
return self.loc - self.start
And the Highway.
from Cell2D import Cell2D
class Highway(Cell2D):
max_acc = 1
min_acc = -10
speed_limit = 40
def __init__(self, n=10, length=1000, eps=0, constructor=Driver):
"""Initializes the attributes.
n: number of drivers
length: length of the track
eps: variability in speed
constructor: function used to instantiate drivers
"""
self.length = length
self.eps = eps
self.crashes = 0
# create the drivers
locs = np.linspace(0, length, n, endpoint=False)
self.drivers = [constructor(loc) for loc in locs]
# and link them up
for i in range(n):
j = (i+1) % n
self.drivers[i].next = self.drivers[j]
def step(self):
"""Performs one time step."""
for driver in self.drivers:
self.move(driver)
def move(self, driver):
"""Updates `driver`.
driver: Driver object
"""
# get the distance to the next driver
dist = self.distance(driver)
# let the driver choose acceleration
acc = driver.choose_acceleration(dist)
acc = min(acc, self.max_acc)
acc = max(acc, self.min_acc)
speed = driver.speed + acc
# add random noise to speed
speed *= np.random.uniform(1-self.eps, 1+self.eps)
# keep it nonnegative and under the speed limit
speed = max(speed, 0)
speed = min(speed, self.speed_limit)
# if current speed would collide with next driver, stop
if speed > dist:
speed = 0
self.crashes += 1
# update speed and loc
driver.speed = speed
driver.loc += speed
def distance(self, driver):
"""Distance from `driver` to next driver.
driver: Driver object
"""
dist = driver.next.loc - driver.loc
# fix wraparound
if dist < 0:
dist += self.length
return dist
def set_odometers(self):
return [driver.set_odometer()
for driver in self.drivers]
def read_odometers(self):
return np.mean([driver.read_odometer()
for driver in self.drivers])
def draw(self):
"""Draws the drivers and shows collisions.
"""
drivers = self.drivers
xs, ys = self.get_coords(drivers)
plt.plot(xs, ys, 'bs', markersize=10, alpha=0.7)
stopped = [driver for driver in self.drivers
if driver.speed==0]
xs, ys = self.get_coords(stopped, r=0.8)
plt.plot(xs, ys, 'r^', markersize=12, alpha=0.7)
plt.axis('off')
plt.axis('equal')
plt.xlim([-1.05, 1.05])
plt.ylim([-1.05, 1.05])
def get_coords(self, drivers, r=1):
"""Gets the coordinates of the drivers.
Transforms from (row, col) to (x, y).
drivers: sequence of Driver
r: radius of the circle
returns: tuple of sequences, (xs, ys)
"""
locs = np.array([driver.loc for driver in drivers])
locs *= 2 * np.pi / self.length
xs = r * np.cos(locs)
ys = r * np.sin(locs)
return xs, ys
Make the animation:
highway = Highway(30, eps=0.02)
highway.animate(frames=50, interval=0.2)
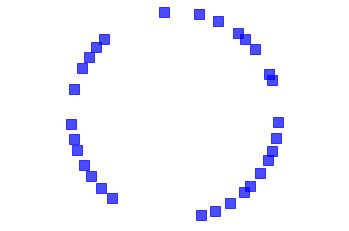
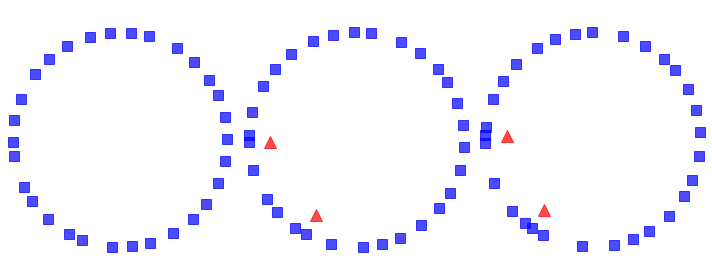
And generate the figure:
from utils import three_frame
highway = Highway(30, eps=0.02)
three_frame(highway, [16, 1, 1], seed=22)
savefig('figs/chap10-1')
Saving figure to file figs/chap10-1
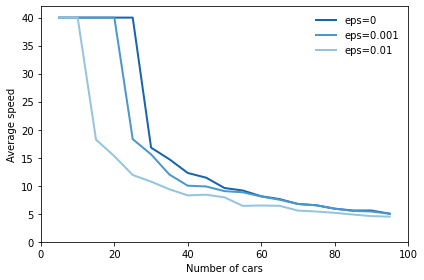
Explore the relationship between eps and average speed.
def run_simulation(eps, constructor=Driver, iters=100):
res = []
for n in range(5, 100, 5):
highway = Highway(n, eps=eps, constructor=constructor)
for i in range(iters):
highway.step()
highway.set_odometers()
for i in range(iters):
highway.step()
res.append((n, highway.read_odometers() / iters))
return np.transpose(res)
Generate the figure:
np.random.seed(20)
from utils import set_palette
set_palette('Blues', 4, reverse=True)
for eps in [0.0, 0.001, 0.01]:
xs, ys = run_simulation(eps)
plt.plot(xs, ys, label='eps=%g' % eps)
decorate(xlabel='Number of cars',
ylabel='Average speed',
xlim=[0, 100], ylim=[0, 42])
savefig('figs/chap10-2')
Saving figure to file figs/chap10-2
Exercise: In the traffic jam simulation, define a class, BetterDriver,
that inherits from Driver and overrides choose_acceleration.
See if you can define driving rules that do better than the basic
implementation in Driver. You might try to achieve higher
average speed, or a lower number of collisions.
Here’s a first attempt:
class BetterDriver(Driver):
def choose_acceleration(self, d):
if self.speed < 20:
return 1
else:
return 0
The following loop runs simulations with Driver and BetterDriver, and plots average speed as a function of the number of cars.
And it prints the area under the curves as one way (but certainly not the only way) to quantify the effect of driving behavior on average speed over the range of densities.
from scipy.integrate import trapezoid
for constructor in [Driver, BetterDriver]:
xs, ys = run_simulation(eps=0.0, constructor=constructor)
plt.plot(xs, ys, label=constructor.__name__)
print(constructor.__name__, trapezoid(ys, xs))
decorate(xlabel='Number of cars',
ylabel='Average speed',
xlim=[0, 100], ylim=[0, 42])
Driver 1512.925
BetterDriver 1238.725
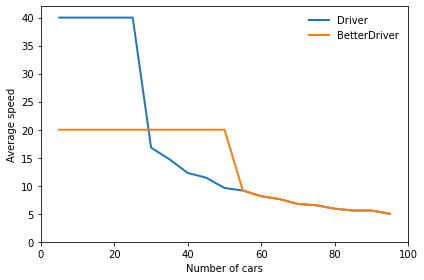
BetterDriver is a little better in the sense that it keeps traffic moving smoothly at medium densities. However:
At high densities, it has almost no effect, and
At low densities, it is substantially worse.
As a result, the total are under the curve is much less.
See if you can write rules for the agents that maximize the area under the curve.